Guillermo Castillo
Ph.D. Canditate in Electrical and Computer Engineering
The Ohio State University - Cyberbotics Lab
I am a Ph.D. candidate at the Cyberbotics Lab at The Ohio State University with six years of hands-on experience as a Robotics Engineer. My expertise lies in creating robuts locomotion controllers for bipedal locomotion through the combination of reinforcement learning and model-based control in both simulations and real-world hardware scenarios.
Interests
- Robotics
- Control Systems
- Reinforcement Learning
- Machine Learning
Education
PhD in Electrical and Computer Engineering, current
The Ohio State University
MSc in Electrical and Computer Engineering, 2019
The Ohio State University
BSc in in Automation and Control Engineering, 2015
Escuela Politecnica Nacional, Ecuador
Experience
Graduate Research Associate
- Worked in system identification, model-based controller design, reinforcement learning, data-driven control, and hardware implementation of controllers for bipedal locomotion (sim-to-real transfer).
- Assisted in tasks for lab management, successfully procuring new resources, creating and maintaining code repositories, designing hardware experiments, and coordinating team meetings and demos for lab visitors.
- Mentored undergraduate and graduate students at the lab with research projects and honors theses.
Full-time lecturer and lab instructor
Instructed undergraduate courses to groups of up to 50 students. Courses taught:
- Geometry Fundamentals
- Chemistry Fundamentals
- Electricity Fundamentals
- Electrical Technology Lab
- Electrical Circuits Lab
Laboratory Assistant
Instructed undergraduate courses to groups of up to 50 students. Courses taught:
- Geometry Fundamentals
- Chemistry Fundamentals
- Electricity Fundamentals
- Electrical Technology Lab
- Electrical Circuits Lab
Awards
Best Paper Award
Workshop on Effective Representations, Abstractions, and Priors for Robot Learning
Presidential Fellowship
Fellowship to support graduate students to continue their research and complete their dissertations.
Fulbright Faculty Development Scholarship
Scholarship provided to pursue graduate education in the USA.
Workshop Travel Award
Scholarship to attend coursework in Photovoltaic Solar Energy at TU Delft.
Projects
*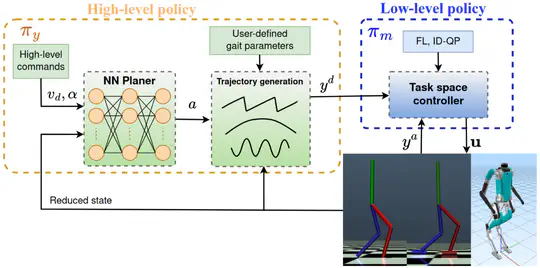
A hierarchical framework for bipedal locomotion that combines an RL-based high-level (HL) planner policy for the online generation of task space commands with a model-based low-level (LL) controller to track the desired task space trajectories.
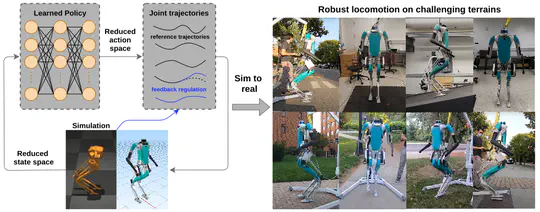
A novel model-free reinforcement learning (RL) framework to design cascade feedback control policies for 3D bipedal locomotion.
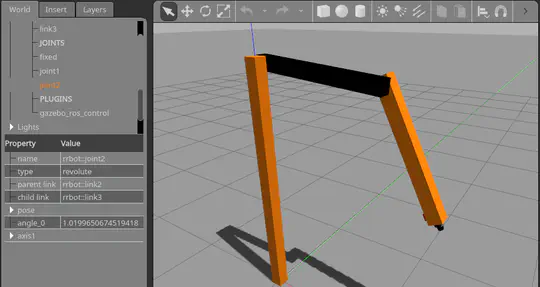
A 2R planar robot is simulated using Gazebo and ROS considering different values of height and mass for each robot’s link and different initial position of the joints. The dynamic behavior of the robot and its response to gravity is analyzed for each different setup of kinematic and dynamic conditions.
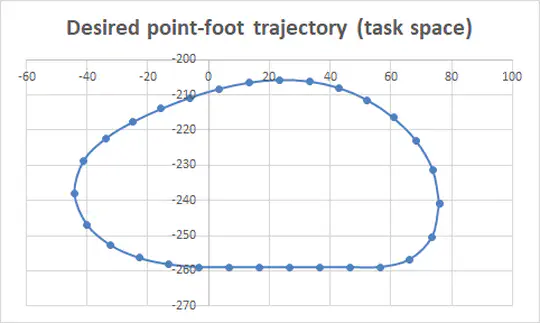
Implementation of trajectory generation for a prototype leg using inverse kinematics, cubic splines and Arduino.
Recent Publications
Quickly discover relevant content by filtering publications.
(2023).
Template Model Inspired Task Space Learning for Robust Bipedal Locomotion.
In 2023 International Conference on Intelligent Robots and Systems (IROS).
(2023).
MELP: Model Embedded Linear Policies for Robust Bipedal Hopping.
In 2023 International Conference on Intelligent Robots and Systems (IROS).
(2023).
Towards Standardized Disturbance Rejection Testing of Legged Robot Locomotion with Linear Impactor: A Preliminary Study, Observations, and Implications.
Preprint.
(2023).
Safe Bipedal Path Planning via Control Barrier Functions for Polynomial Shape Obstacles Estimated Using Logistic Regression.
In 2023 International Conference on Robotics and Automation (ICRA).
