Academic
Academic
Home
Projects
Talks
Publications
Contact
Light
Dark
Automatic
1
Data-Driven Latent Space Representation for Robust Bipedal Locomotion Learning
This paper presents a novel framework for learning robust bipedal walking by combining a data-driven state representation with a …
Guillermo A. Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
Cite
Video
arXiv
Template Model Inspired Task Space Learning for Robust Bipedal Locomotion
This work presents a hierarchical framework for bipedal locomotion that combines a Reinforcement Learning (RL)-based high-level (HL) …
Guillermo A. Castillo
,
Bowen Weng
,
Shunpeng Yang
,
Wei Zhang
,
Ayonga Hereid
Cite
Video
arXiv
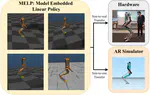
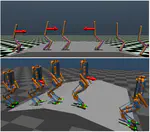
MELP: Model Embedded Linear Policies for Robust Bipedal Hopping
Linear policies are the simplest class of policies that can achieve stable bipedal walking behaviors in both simulation and hardware. …
Raghav Soni
,
Guillermo A. Castillo
,
Lokesh Krishna
,
Ayonga Hereid
,
Shishir Kolathaya
Cite
Towards Standardized Disturbance Rejection Testing of Legged Robot Locomotion with Linear Impactor: A Preliminary Study, Observations, and Implications
Dynamic locomotion in legged robots is close to industrial collaboration, but a lack of standardized testing obstructs …
Bowen Weng
,
Guillermo A. Castillo
,
Yun-Seok Kang
,
Ayonga Hereid
Cite
Video
DOI
arXiv
Safe Bipedal Path Planning via Control Barrier Functions for Polynomial Shape Obstacles Estimated Using Logistic Regression
Safe path planning is critical for bipedal robots to operate in safety-critical environments. Common path planning algorithms, such as …
Chengyang Peng
,
Octavian Donca
,
Guillermo A. Castillo
,
Ayonga Hereid
Cite
Video
DOI
arXiv
On Safety Testing, Validation, and Characterization with Scenario-Sampling: A Case Study of Legged Robots
The dynamic response of the legged robot locomotion is non-Lipschitz and can be stochastic due to environmental uncertainties. To test, …
Bowen Weng
,
Guillermo A. Castillo
,
Wei Zhang
,
Ayonga Hereid
Cite
Video
DOI
arXiv
Learning Linear Policies for Robust Bipedal Locomotion on Terrains with Varying Slopes
In this paper, with a view toward deployment of light-weight control frameworks for bipedal walking robots, we realize end-foot …
Lokesh Krishna
,
Utkarsh A. Mishra
,
Guillermo A. Castillo
,
Ayonga Hereid
,
Shishir Kolathaya
Cite
Video
DOI
arXiv
Robust Feedback Motion Policy Design Using Reinforcement Learning on a 3D Digit Bipedal Robot
This paper presents a neural-network based adaptive feedback control structure to regulate the velocity of 3D bipedal robots under …
Guillermo A. Castillo
,
Bowen Weng
,
Ayonga Hereid
,
Wei Zhang
Cite
Video
DOI
arXiv
Velocity regulation of 3d bipedal walking robots with uncertain dynamics through adaptive neural network controller
This paper presents a neural-network based adaptive feedback control structure to regulate the velocity of 3D bipedal robots under …
Guillermo A. Castillo
,
Bowen Weng
,
Terrence C Stewart
,
Ayonga Hereid
,
Wei Zhang
Cite
Video
DOI
arXiv
Hybrid Zero Dynamics Inspired Feedback Control Policy Design for 3D Bipedal Locomotion using Reinforcement Learning
This paper presents a novel model-free reinforcement learning (RL) framework to design feedback control policies for 3D bipedal …
Guillermo A. Castillo
,
Bowen Weng
,
Ayonga Hereid
,
Wei Zhang
Cite
Video
DOI
arXiv
»
Cite
×