MELP: Model Embedded Linear Policies for Robust Bipedal Hopping
Abstract
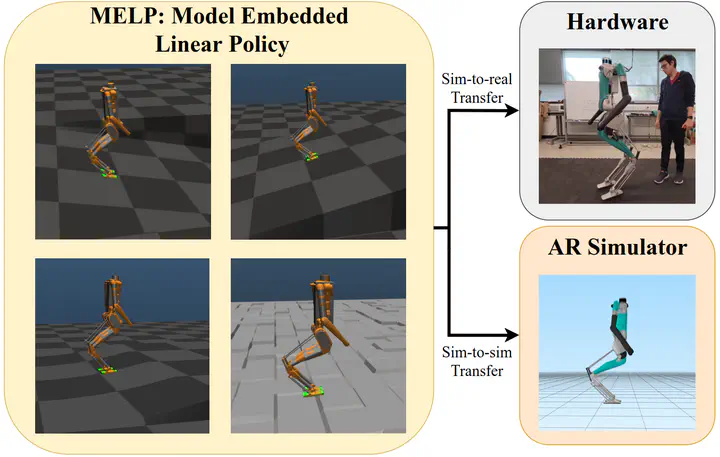
Linear policies are the simplest class of policies that can achieve stable bipedal walking behaviors in both simulation and hardware. However, a significant challenge in deploying them widely is the difficulty in extending them to more dynamic behaviors like hopping and running. Therefore, in this work, we propose a new class of linear policies in which template models can be embedded. In particular, we show how to embed Spring Loaded Inverted Pendulum (SLIP) model in the policy class and realize perpetual hopping in arbitrary directions. The spring constant of the template model is learned in addition to the remaining parameters of the policy. Given this spring constant, the goal is to realize hopping trajectories using the SLIP model, which are then tracked by the bipedal robot using the linear policy. Continuous hopping with adjustable heading direction was achieved across different terrains in simulation with heading and lateral velocities of up to 0.5m/sec and 0.05m/sec, respectively. The policy was then transferred to the hardware, and preliminary results (> 10 steps) of hopping were achieved.