Learning Linear Policies for Robust Bipedal Locomotion on Terrains with Varying Slopes
Abstract
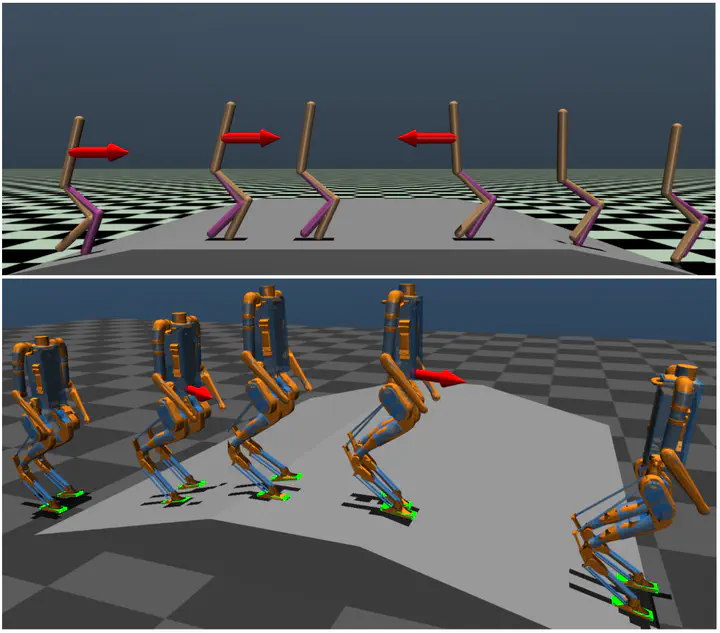
In this paper, with a view toward deployment of light-weight control frameworks for bipedal walking robots, we realize end-foot trajectories that are shaped by a single linear feedback policy. We learn this policy via a model-free and a gradient free learning algorithm, Augmented Random Search (ARS), in the two robot platforms Rabbit and Digit. Our contributions are two-fold a) By using torso and support plane orientation as inputs, we achieve robust walking on slopes of upto 20° in simulation. b) We demonstrate additional behaviors like walking backwards, stepping-in-place, and recovery from external pushes of upto 120 N. The end-result is a robust and a fast feedback control law for bipedal walking on terrains with varying slopes. Towards the end, we also provide preliminary results of hardware transfer to Digit.