Academic
Academic
Home
Projects
Talks
Publications
Contact
Light
Dark
Automatic
Source Themes
On the Comparability and Optimal Aggressiveness of the Adversarial Scenario-Based Safety Testing of Robots
This article studies the class of scenario-based safety testing algorithms in the black-box safety testing configuration. For …
Bowen Weng
,
Guillermo A. Castillo
,
Wei Zhang
,
Ayonga Hereid
Cite
DOI
Reinforcement Learning-Based Cascade Motion Policy Design for Robust 3D Bipedal Locomotion
This paper presents a novel reinforcement learning (RL) framework to design cascade feedback control policies for 3D bipedal …
Guillermo A. Castillo
,
Bowen Weng
,
Ayonga Hereid
,
Wei Zhang
PDF
Cite
Video
DOI
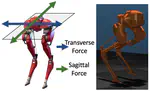
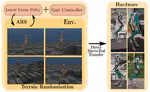
Linear Policies are Sufficient to Realize Robust Bipedal Walking on Challenging Terrains
In this work, we demonstrate robust walking in the bipedal robot Digit on uneven terrains by just learning a single linear policy. In …
Lokesh Krishna
,
Guillermo A. Castillo
,
Utkarsh A. Mishra
,
Ayonga Hereid
,
Shishir Kolathaya
Cite
Video
DOI
arXiv
Cite
×